Робототехника
Тема 3: Что нужно знать, чтобы создавать роботов?Урок 2: Чем занимаются инженеры - программисты
- Теория
Программисты
Программы нужны, чтобы...
Помочь роботу вовремя снять показания с датчиков. Задача программы — дать роботу порядок действий: вот так получаешь информацию из внешнего мира, вот так с ней поступаешь. Например, именно на уровне программы определяется, с какой частотой робот снимает данные с датчиков в память. Когда речь идет о метеостанции, программу для снятия данных достаточно запускать несколько раз в сутки. В случае с беспилотным автомобилем ситуация другая: информацию с датчиков необходимо получать в режиме реального времени, чтобы обеспечить безопасность всех участников движения.
Помочь роботу принять верное решение на основе данных датчиков. Получив данные, программа соотносит их с некоторым эталонным значением. Допустим, программа дает сигнал промышленному манипулятору переместить предмет. Датчики манипулятора сообщают программе, как он расположен в пространстве, открыт или закрыт захватный механизм, есть ли в нем груз. Сравнивая показания датчиков с эталонными для текущей ситуации значениями, программа корректирует его действия. Эталонной величиной может быть, например, градус наклона манипулятора. Если робот действует в зависимости от температуры, это и будет его эталонной величиной. Если его функция связана со скоростью, то эталонная величина — минимальная или максимальная скорость.
Помочь роботу «видеть» и распознавать объекты. Вы уже знаете, как графы помогают роботам двигаться. Теперь давайте посмотрим, как они помогают «видеть». Любым роботам, которые манипулируют объектами, необходимо уметь различать их между собой. Камеры и алгоритмы распознавания позволяют фактически научить робота «видеть» окружающий мир.
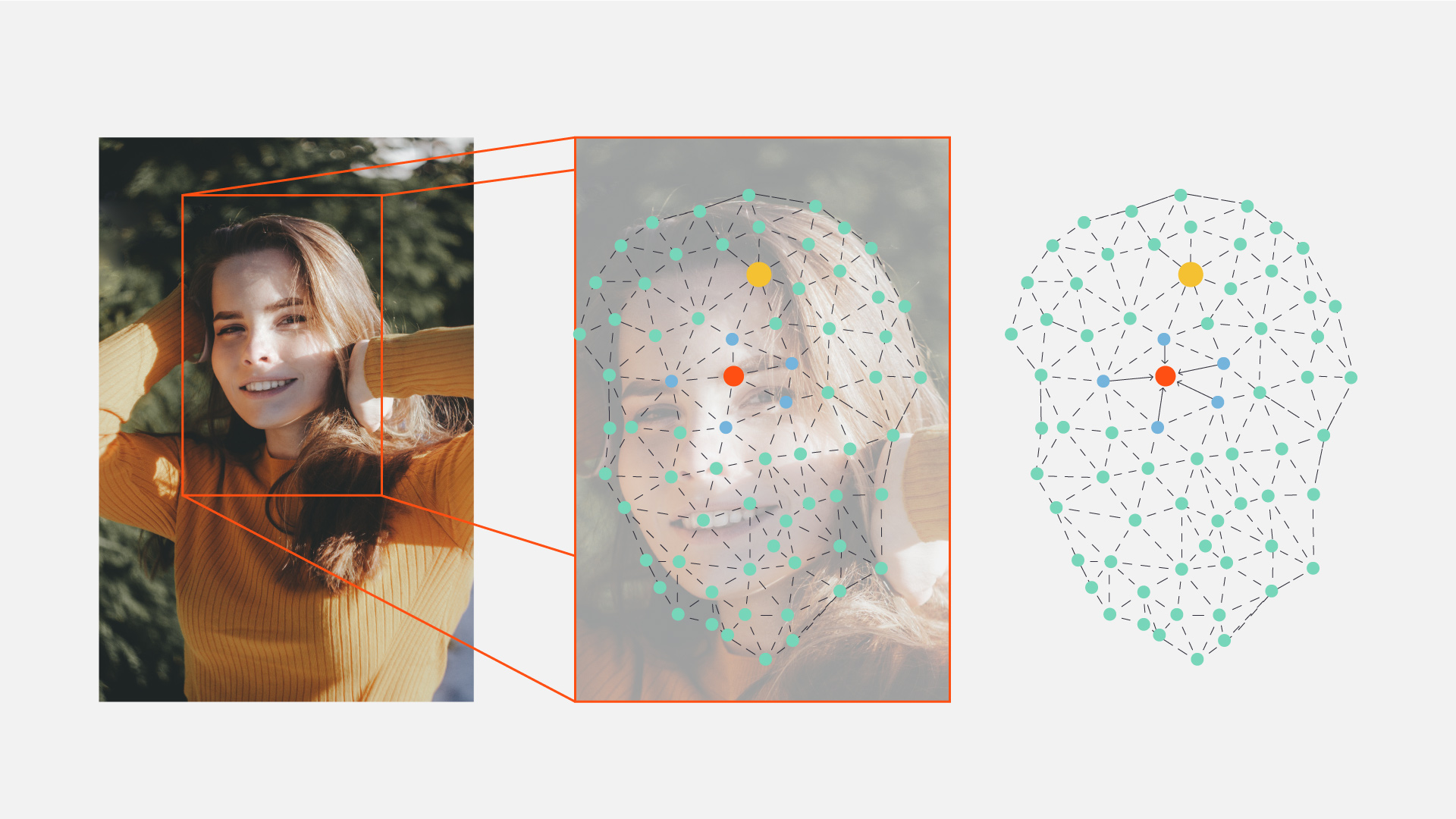
Одна из задач в процессе распознавания образов — выделение контуров объектов. Тут графы и приходят на помощь. Например, они помогают выделить подконтуры. Компьютер не видит, как человек, весь объект целиком, а может только распознать отдельные части, сопоставить с другими изображениями и достроить целое. Подконтуры, то есть контуры частей, помогают собрать объект воедино, составить общую картинку.
Те же графы позволяют построить модель поверхности объекта: горизонтальная, вертикальная, с изгибом, здесь выпуклая, тут вдавленная. Сличая разные поверхности из своей базы, робот «понимает» форму объекта. Сравнивая контуры одного и того же объекта, программа может сделать вывод, что он переместился (она сопоставляет два контура и «понимает», что они похожи, значит, положение объекта изменилось).
